

 联系我们
联系我们

位置寄存器指令,是进行位置寄存器的算术运算的指令。位置寄存器指令可进行代入、加算、減算处理,以与寄存器指令相同的方式记述。
位置寄存器,是用来存储位置资料(x,y,z,w,p,r)的变量(有关位置寄存器)。标准情况下提供有 100 个位置寄存器。
注释:
使用位置寄存器指令之前,通过“LOCK PREG”来锁定位置寄存器。若没有进行锁定,动作可能会集中在一起。有关“LOCK PREG”指令,可参阅 9.6 位置寄存器先执行功能。
PR[i] =(值)
PR[i] =(值)指令,将位置资料代入位置寄存器。
PR[i]=(值)
i :
位置寄存器号码(1~100)
值:
PR [ i ]:位置寄存器[i]的值
P[ i ]:程序内的示教位置[i]的值
LPOS:当前位置的直角坐标值
JPOS:当前位置的关节坐标值
U
UTOOL[ i ]:工具坐标系[i]的值
例
1: PR[1]= LPOS
2: PR[R[4]]= U
3: PR[GP1: 9]= UTOOL[GP1: 1]
PR[i] =(值)+(值)
PR[i] =(值)+(值)指令,代入2个值的和。
PR[i] =(值)-(值)指令,代入2个值的差。
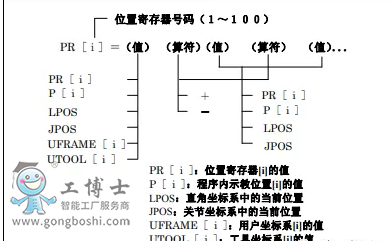
PR[i]=(值) (算符)(值) (算符) (值)...
PR[ i ]:位置寄存器[i]的值
P[ i ]:程序内示教位置[i]的值
LPOS:直角坐标系中的当前位置
JPOS:关节坐标系中的当前位置
U
UTOOL[ i ]:工具坐标系[i]的值
例
4: PR[3] = PR[3]+LPOS
5: PR[4] = PR[ R[1] ]
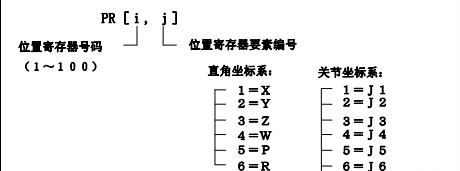
位置寄存器要素指令
位置寄存器要素指令,是进行位置寄存器的算术运算的指令。
PR[i,j]的i表示位置寄存器号码,j表示位置寄存器的要素号码。位置寄存器要素指令可进行代入、加算、減算处理,以与数值寄存器指令相同的方式记述。
PR[i,j] =(值)
PR[i,j] =(值)指令,将位置资料的要素值代入位置寄存器要素
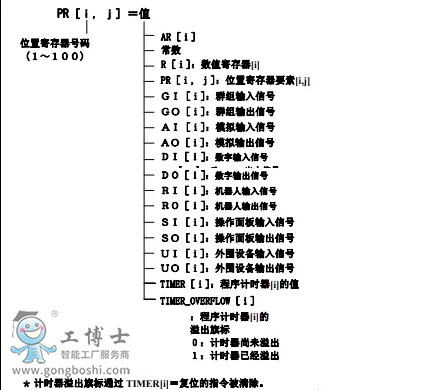
例1: PR[1, 1]= R[3]
2: PR[4, 3]= 324.5
PR[i,j] =(值)+(值)
PR[i,j] =(值)+(值)指令,将2个值的和代入位置寄存器要素。
PR[i,j] =(值)-(值)
PR[i,j] =(值)-(值)指令,将2个值得差代入位置寄存器要素。
PR[i,j] =(值)*(值)
PR[i,j] =(值)*(值)指令,将2个值的积代入位置寄存器要素。
PR[i,j] =(值)/(值)
PR[i,j] =(值)/(值)指令,将2个值的商代入位置寄存器要素。
PR[i,j] =(值)MOD(值)
PR[i,j] =(值)MOD(值)指令,将2个值的余数代入位置寄存器要素。
PR[i,j] =(值)DIV(值)
PR[i,j] =(值)DIV(值)指令,将2个值的商的整数值部分代入位置寄存器要素。

了解更多:发那科机器人
- 下一篇:发那科机器人建立定义工具坐标系的工作站步骤分享
- 上一篇:发那科机器人的组装流程分享