

 联系我们
联系我们

打开ROBOGUIDE,新建一个Cell,选择一个工业机器人,本例使用M-10iA/7L做示例,按如下步骤创建↓

选择对应的机器人

选择完毕后点击“Finish”。

出现图示选项时输入2,点击“ENTER”。

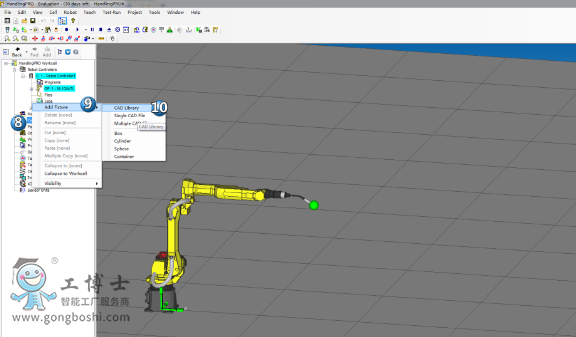
到这里创建完成了工作站然后导入定义工具坐标系的基准(即一个圆锥体)。

按照图示进入“CAD Library”。
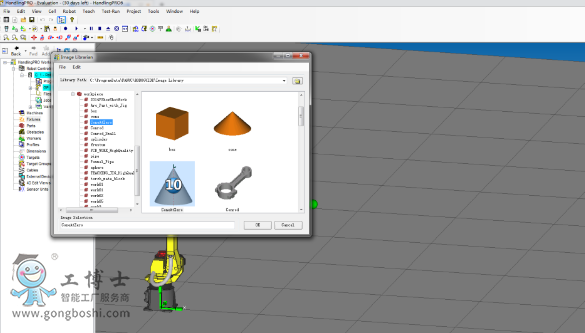
找到“ConeAtZero”,然后点击“OK”。
按图示红色 数值输入框输入参数,然后点击“OK”。

进入示教器,准备调整一下机器人第五轴的位置,以便于更好调节机器人。

点击14步所示按钮。

按红色数值输入框中输入数值,然后点击“MoveTo”。

调整后机器人姿态如下图。

到这里工作站就创建完成,可以用于学习建立工具坐标系了。
了解更多:发那科机器人发那科机器人在做具体应用之前需要设定工具坐标系,以更好的描述机器人第六轴法兰盘上的工具末端的姿态与位置,虽然可以利用实际机器人来学习如何定义,但是单独找一个可以实操的机器人有时很困难,所以需要在仿真软件里面学习,但是又苦恼不知如何下手,仿真软件又很复杂,下面就来学习一下如何在ROBOGUIDE中建立一个专门学习建立工具坐标系的工作站。
选择对应的机器人
选择完毕后点击“Finish”。
出现图示选项时输入2,点击“ENTER”。
到这里创建完成了工作站然后导入定义工具坐标系的基准(即一个圆锥体)。
按照图示进入“CAD Library”。
找到“ConeAtZero”,然后点击“OK”。
按图示红色 数值输入框输入参数,然后点击“OK”。
进入示教器,准备调整一下机器人第五轴的位置,以便于更好调节机器人。
点击14步所示按钮。
按红色数值输入框中输入数值,然后点击“MoveTo”。
调整后机器人姿态如下图。
到这里工作站就创建完成,可以用于学习建立工具坐标系了。
了解更多:发那科机器人